In this article, we summarize system identification and dynamic system modeling. Links to related articles and explanatory articles are placed at the bottom.
Overview of System Identification
Now, I would like to explain modeling and system identification. First, mathematical models play an important role in control engineering. When performing model-based control, we first derive a model based on the input-output characteristics of the control target.
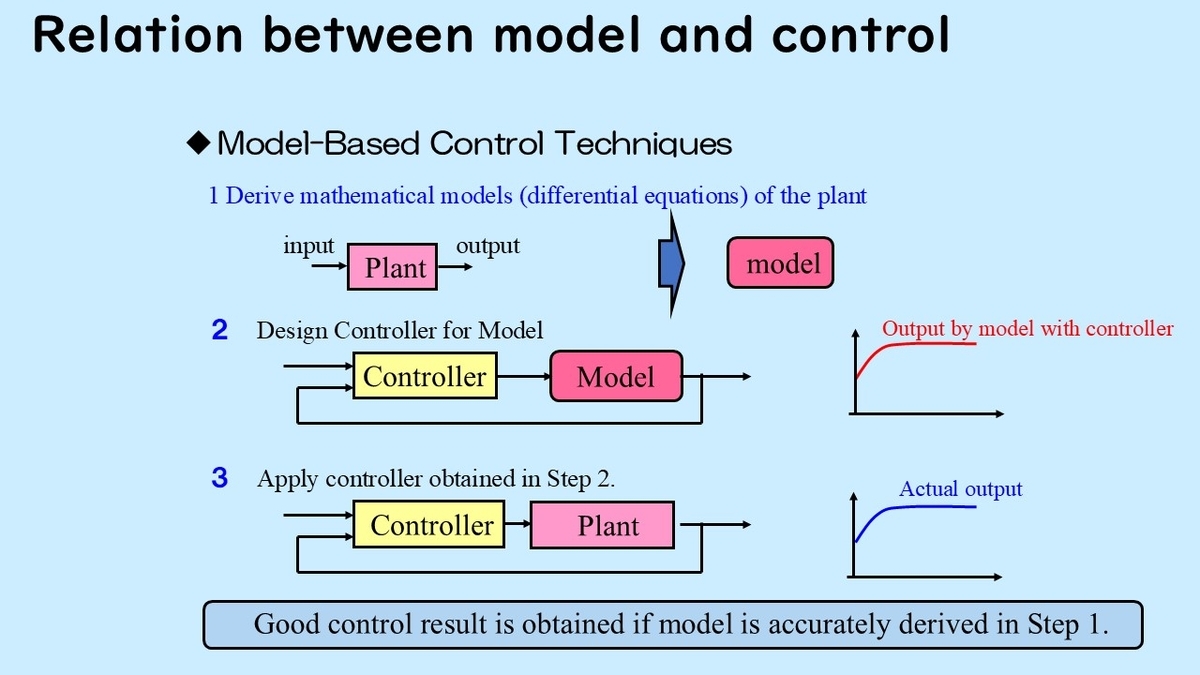
Then, we proceed with the process of designing a controller that achieves the required performance for the obtained mathematical model. By applying the controller obtained in this way to the actual control target, control is performed.
If the model is accurately obtained at this time, the desired response can be realized by the controller derived based on the model. On the other hand, it becomes difficult to achieve good control with an inaccurate model.
Model Representation
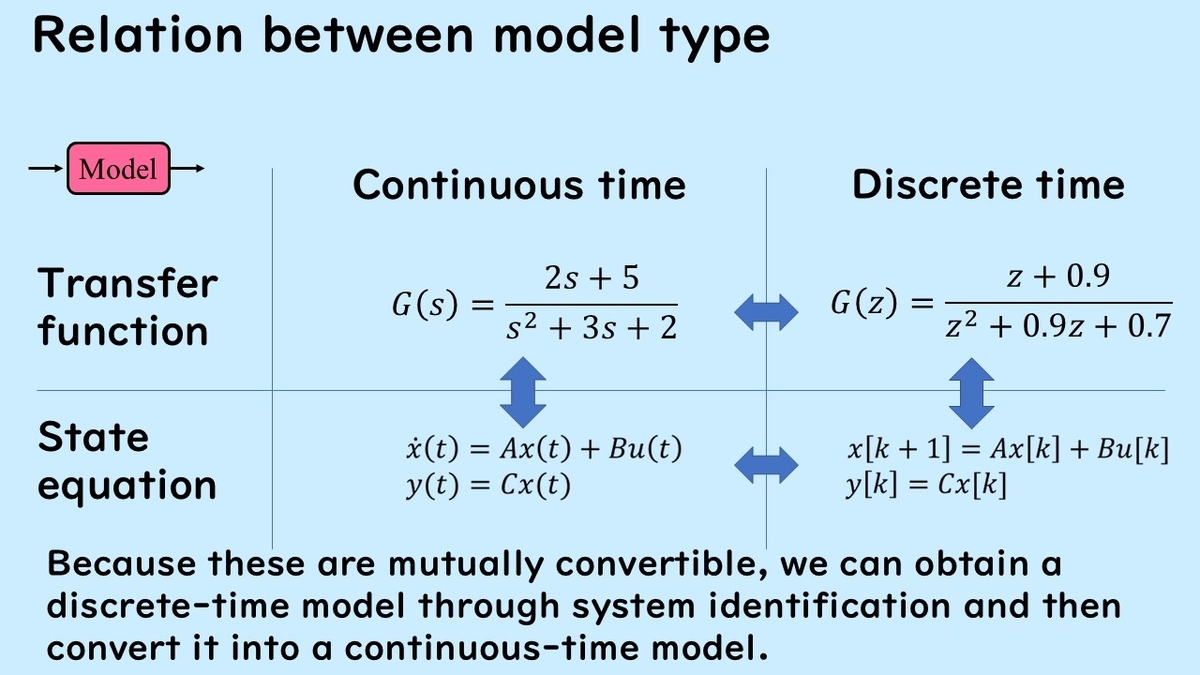
Here, I would like to explain the representation of mathematical models of control targets. Common methods used in control include modeling representations such as transfer functions and state equations.
Also, classification is made based on whether time is treated as a continuous-time system or a discrete-time system.
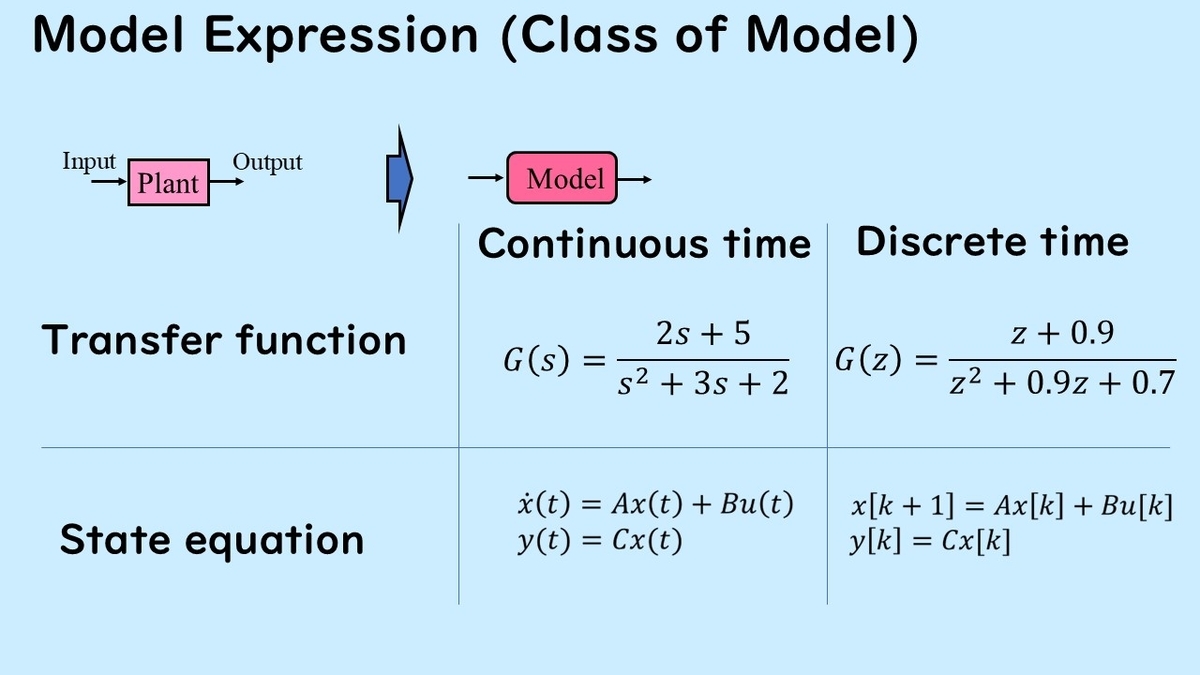
With the premise that there are these four model representations, we will proceed.
Here, I will explain modeling. When there is a mathematical model, we can obtain the model by determining the values of each matrix so that the characteristics from input to output
become the mathematical model of the target. Specifically, by appropriately setting each parameter
, it is ideal that the output obtained when applying the same input as the plant is also the same in the mathematical model.
If appropriate matrices are obtained, the mathematical model can realize the same input-output characteristics and input-output response as the target.
Here, I will introduce two modeling methods.
The first is the physical laws of the control target P. For example, obtaining a mathematical model from spring constants or circuit coefficients. The second method is to obtain a mathematical model from input u and output y data when the internal parameters or physical laws of the mathematical model are unknown.
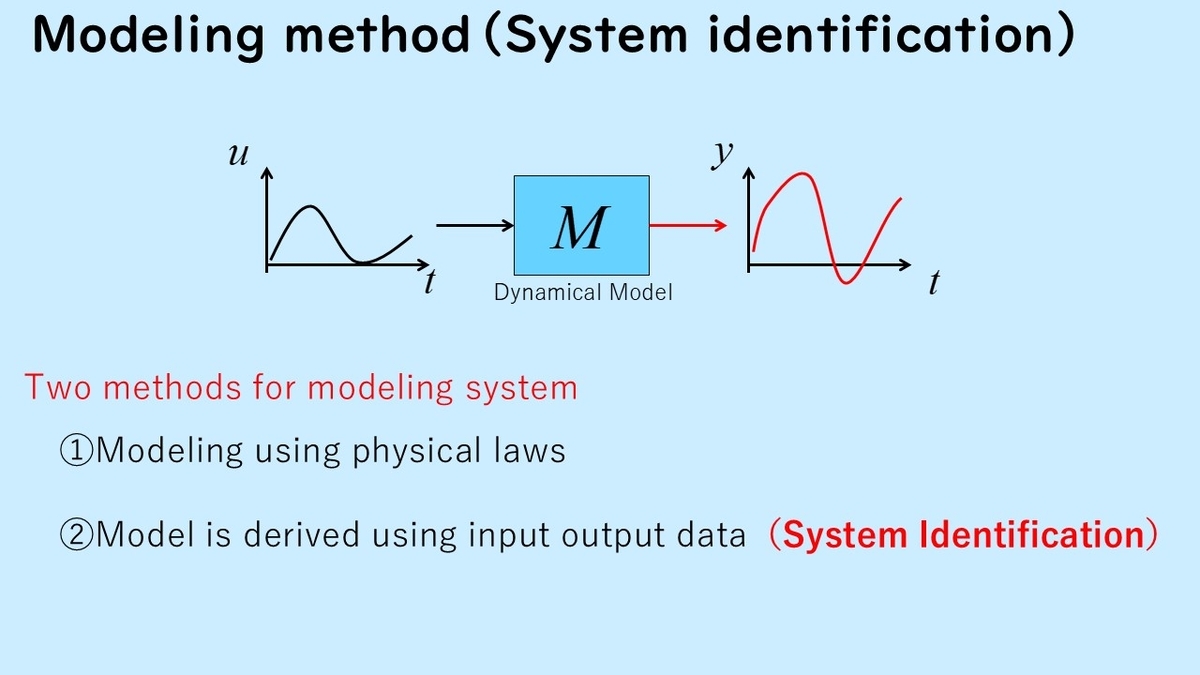
This is called system identification, and it's the method that will be explained later.
When dealing with system identification here, basically the parameters of the discrete-time system are obtained.
However, when the transfer function or state equation in discrete time is obtained, it can be converted into a continuous-time state equation or transfer function based on it. In this way, since such mutual conversion is possible, we obtain a discrete-time model through system identification, and if it is necessary to convert it into a continuous-time model, we proceed to convert it into a continuous-time model. In this process, any model can be obtained.
In the process of control system design and implementation after obtaining the model, various elements such as the control target model, the size of uncertainty, the nature of disturbances, observed outputs in control system implementation, and manipulated inputs are required. By appropriately constructing this model, more precise control can be achieved.
In general, in system identification, the structure of the model to represent the system is given in advance.
Here, the input is given as , and the output as
. The
included in
are the system parameters.
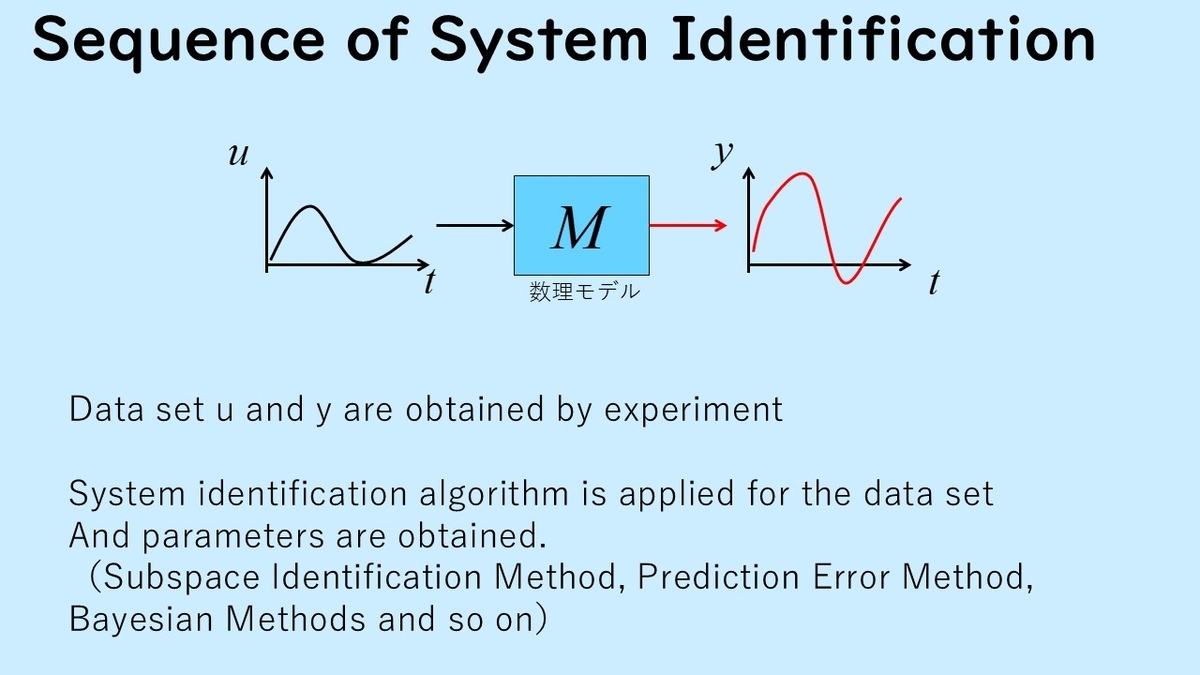
Now, let's move on to the actual procedure of system identification. The process is simple.
First, we obtain data of input and output
. When acquiring this data of input
and
, it is necessary to determine the input
so that it adequately satisfies the index called PE property, which indicates the richness of information.
Then, using an identification algorithm on the obtained input-output data, we determine the parameters .
Representative methods include subspace identification methods and prediction error methods.
From here on, we will perform simulations using MATLAB.
Example of System Identification Simulation
In MATLAB, subspace identification methods and prediction error methods are provided as functions, so we will try performing identification using them.
Now, let's actually perform system identification using MATLAB.
Identification (m-file) - Google Drive
First, we consider this control target. Then, we apply a signal called a chirp signal to it, and as a result, perform system identification.
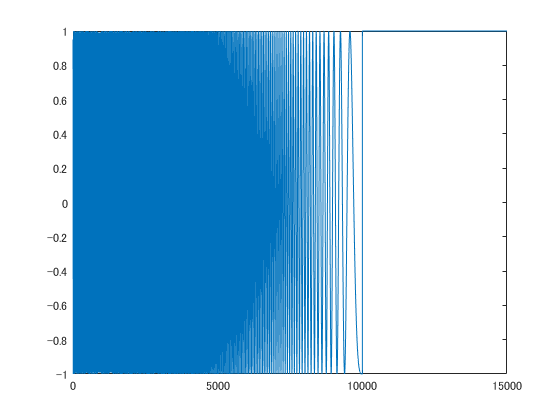
Here, we first generate a chirp signal as the input, and use it to obtain input-output data.
The output data is given here. Note that the system includes noise. In this numerical example, we would like to confirm that identification is properly performed under an environment that includes noise.
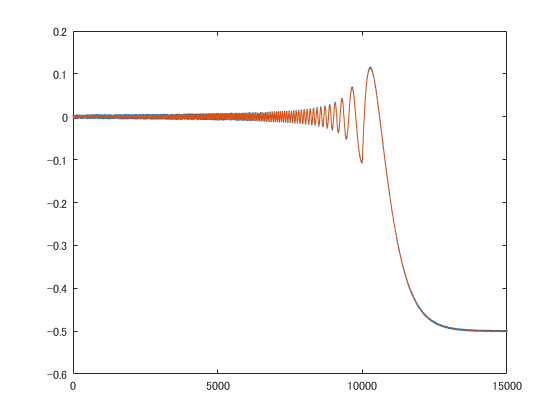
This is the output when a signal called a chirp signal is applied, and the output is obtained like this for inputs with various frequency components.
These are the step responses of the original system and the system obtained by identification. Blue is the original system, orange is the model output.
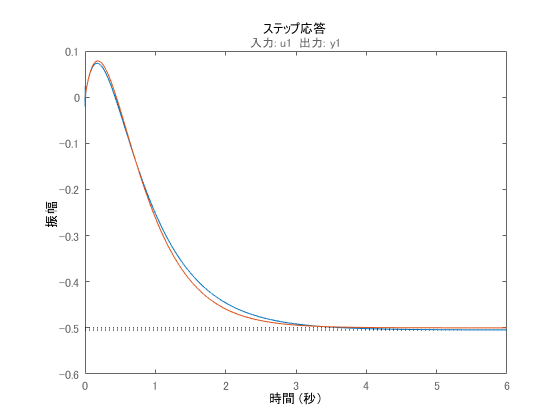
We can see that the waveforms are similar, but there is an error. Whether this error becomes larger or smaller depends on various settings in system identification.
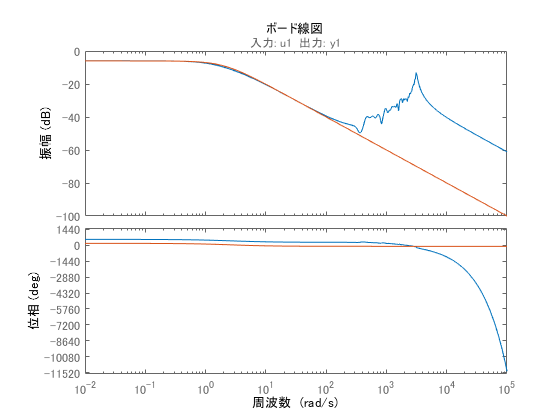
This is the Bode plot of the control target and the system obtained by identification. You can see that they almost match at low frequencies.
About Mutual Conversion of Mathematical Models
Continuous-time and discrete-time models can be converted mutually, and transfer functions and state equations can also be converted. After modeling using some method, it is important to convert it into the model you actually want to use and design within the applicable range.
Videos and Related Articles on System Identification
The following are videos explaining system identification and modeling.
This is a video by Professor Hiroshi Oku from Osaka Institute of Technology.
Books on System Identification
Here are some books on system identification in Japan.
Here is Professor Shuichi Adachi's book.

Here is a book on system identification using MATLAB.

Here is a system identification book by Professor Yusuke Fujimoto of Kitakyushu City University and Professor Masaaki Nagahara of Hiroshima University.
")
Here is a system identification book by Professors Kiyoshi Wada, Hiroshi Oku, Hideyuki Tanaka, and Shigeru Omatsu.
")
Here is Professor Toru Katayama's book on system identification.

This is the end of the article.
![]()
Artificial Intelligence & AI Ranking
About Me
Hiroshi Okajima (Associate Professor, Department of Electrical and Computer Engineering, Faculty of Engineering, Kumamoto University)
I am researching control engineering, including model error suppression compensators, state estimation, quantized control, etc.
Laboratory Website
Okajima Laboratory (Systems Control control-theory.com)
Control Video Portal Site
Control Engineering Channel (Transfer Functions, State Equations, MATLAB, etc.)
Electrical Video Portal Site
Electrical and Electronic Channel (Semiconductors, Electricity, Electronic Work, etc.)
Control Engineering Channel (Control YouTube Channel)
Thank you for reading this article. If you found it helpful, I would appreciate actions like bookmarking or sharing.