この記事では制御工学の基礎事項として制御の概要を数式なしで示します。関連動画は最下部に置いています。
制御工学における仕様
制御では様々なタイプの制御対象や制約条件があります。また、達成すべき目的も様々です。しかし、ざっくりとした目的は似ている部分もありますし共通の変数設定があります。ここでは、その全体像について触れます。

まず、制御では以下の2つが主要な目的となります。
- 出力信号の指定された設定値への維持(レギュレーション)
- 出力信号の目標信号への追従(トラッキング)
レギュレーションでは、外乱等の影響下でも出力信号が一定に維持されるようにフィードバック制御を行います。
トラッキングでは、時間的に変化する目標値の動きに出力信号を合わせます。特に変化の速い目標信号への追従を行う場合には、制御則によって性能の良し悪しが大きく変わってきます。
制御に用いられる信号
制御でよく使われる信号は以下の通りです。それぞれ引数は時間であり、時間の関数として各種信号が定義されています。
: 出力信号(制御出力,観測出力)
: 評価出力
: 入力信号(制御入力)
: 参照信号,目標値信号
: 偏差信号,誤差信号
: 外乱信号
制御対象への入力として制御入力は設計者が自由にその時系列を設定できる変数であり、操作入力とも呼びます。フィードバック制御の設計を行った結果として、操作入力の時系列が定められます。他方、制御対象に入力される信号として外乱信号も挙げられます。これは、対象の振る舞いに影響を与える操作できない信号です。さらに、外乱信号は観測できないことがほとんどです。もし、仮に観測できるのであれば、それを打ち消すような対処を制御系の内部で施すこともできますが、基本か観測できないものとして扱われます。
制御対象の出力としては、制御出力および観測出力が挙げられます。これらは同じ信号が採用されることもあります。制御出力はレギュレーション問題・トラッキング問題の双方において望ましい振る舞いを要求される信号です。制御出力とは別に、制御系設計時の評価用に評価出力を設定することもあります。
他方、観測出力は測定できる変数であり、ノイズ・観測誤差を含むことがあります。そのノイズの大小を考慮すべきかしなくて良いかを先に判断することが設計においては重要な要素の一つとなります。
制御では、目標値信号と出力信号の差を誤差信号として捉えることがあり、フィードバックに用いることが多くあります。レギュレーション問題においてもトラッキング問題においても誤差は小さい方が良いです。そのため、その信号を制御入力の生成に利用することは合理的と言えるでしょう。
コントローラと制御結果
コントローラ(制御器)をどのように与えるかで制御性能が異なってきます。このことを具体的に確認します。まず、レギュレーション問題として、以下の制御対象にフィードバック制御を施す場合を考えます。
\begin{equation} y(s) = \frac{s+1}{(s+3)s} (u(s) + d(s))\end{equation}
ここで、は外乱信号であり、そのラプラス変換が
です。同様に
が制御出力、
が制御入力です。制御対象は積分器を持っています。制御入力
は制御器
により決まります。ここでは、参照信号
として出力波形
に着目します。
外乱は次の信号とします。

このとき、制御によって外乱を抑制します。まず、制御器を次のように与えます。
\begin{equation} C_1 = \frac{5s + 20}{s}\end{equation}
このとき、この制御器を適用しフィードバック系を組んだ場合の出力波形は次のようになります。

フィードバック制御により、外乱の影響が抑えられ、その振幅がプラスマイナス0.005程度となっています。次に、別の制御器を適用した場合を見てみましょう。制御器としてを次のように与えます。
\begin{equation} C_2 = \frac{200s+50}{s}\end{equation}
このとき、の制御器を適用しフィードバック系を組んだ場合の出力波形は次のようになります。

このとき、制御器を用いていた場合よりも外乱が出力に与える影響が小さくなっていることがわかります。同じ制御対象に制御を施しても制御器が違うと出力性能が異なってくることがわかります。
次にトラッキング問題です。ここでも、上で用いた制御器と制御器
の出力波形を比較します。

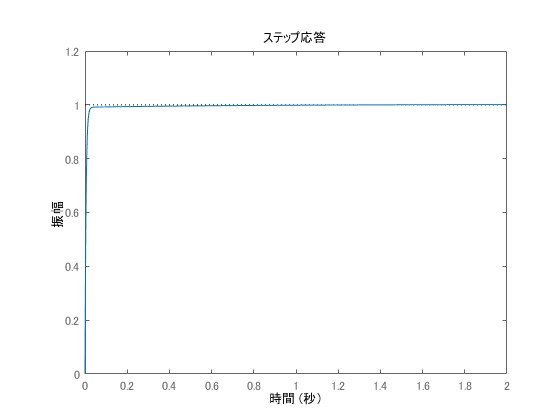
このとき、制御器の方が速く目標値である1に収束しています。このように、制御器が異なると制御結果が異なります。このケースではパラメータの大きさが違うだけでしたが、制御構造が違っても実現できる応答が変わってきます。また、制御対象の種類や特性によっても実現できる制御応答は様々です。
設計・実装プロセス
次に制御の設計・実装プロセスにおいて考慮すべき事項について述べます。まず、制御系を構成するにあたり、対象の数理モデルが必要になってきます。モデルベースド制御では、対象の数理モデルが既知のものとして議論を進めることになります。対象のモデルは不確かさを含むモデル化を行うこともありますし、外乱の性質をモデル化することもあります。
また、制御系実装時には、観測・操作について綿密に決める必要が出てくる。制御の性能や精密さは、これらの情報をどれくらいの質や量で扱えるかで決まってきます。特に、量子化やディジタル化によって性能が変わることもありますので詳細に対象の特性だけでなくセンサやアクチュエータ、制御周期などを意識して設計することが重要です。
制御工学の学問としての役割
制御工学の学問としての役割は、「どのような制御対象に」、「どのような状況の下で」、「どのような情報を」、「どのように使うと」、「どのような制御ができるか」を明らかにすることです。
非線形システムやむだ時間など、対象の特徴に合わせて特有の制御工学手法や理論が展開されています。対象の特徴だけでなく制約として例えば、入力飽和や量子化なども考える必要があり、これらは様々に研究されています。
また、「どのような制御ができないか」を明らかにすることも制御工学の学問的な意義の一つです。
関連動画
以下が本記事の関連動画になります。
自己紹介
岡島 寛 (熊本大学工学部情報電気工学科准教授)
制御工学の研究をしています。モデル誤差抑制補償器,状態推定,量子化制御など
研究室HP
岡島寛 (システム制御 control-theory.com)
English Web Page
Hiroshi Okajima (Control Engineering control-theory.com)
制御動画ポータルサイト
制御工学チャンネル(伝達関数・状態方程式・MATLABなど)
電気動画ポータルサイト
本記事をお読みいただきありがとうございます。役に立った、と思われましたら、ブックマーク・シェア等のアクションをしていただければ嬉しいです。