この記事ではブロック線図についてまとめます。ブロック線図について説明した動画や関連記事リンクは最下部に置いています。
ブロック線図
ブロック線図は、システムの全体像を図的表現するために用いられます。その構成要素はブロックおよび矢印線であり、ブロックは要素やシステムを表現するのに用いられ、矢印は信号の流れを表現します。最も簡単なブロック線図は以下のように与えられます。

このとき、伝達関数表現されたシステムについて次式が成り立ちます。
\begin{equation}y(s) = G(s)u(s)\end{equation}
ブロック線図を用いた表現は様々な対象システムについて行われますが、ブロックの構成要素と全体像を結びつける際には、伝達関数表現されたシステムを利用すると便利です。このことは後述します。
以降では、個々のブロックが伝達関数として与えられた場合について議論を展開します。
ブロック線図と演算
加え合わせ点
まず、以下の図では、信号と
が加え合わせ点で結合され、出力
を得ます。

このとき、時間領域 t で次式が成り立ちます。
\begin{equation} z(t) = u(t) + v(t) \end{equation}
同様に、s 領域でも次式を満たすことになります。
\begin{equation} z(s) = u(s) + v(s) \end{equation}
次に、の入力の矢印横にプラスではなくマイナスがついている場合を考えます。次式がマイナスをつけた場合の表記です。

このとき、時間領域 t で次式が成り立ちます。
\begin{equation} z(t) = u(t) - v(t) \end{equation}
つまり、矢印の横に記載されている符号を確認しプラスのときは信号にを掛けて足し合わせ、マイナスのときは信号に
を掛けて足し合わせる操作をします。
引き出し点
引き出し点は、次図のように記述され、いくつ引き出しても信号の値は変化しません。

システムの直列接続
次に、ブロックの直列接続について説明します。直列接続は次の図で与えられます。

このとき、出力は次式で与えられます。
\begin{equation} y(s) = G_1(s) G_2(s) u(s) \end{equation}
システムの並列接続
次に、ブロックの並列接続について説明します。並列接続は次の図で与えられます。

このとき、出力は次式で与えられます。
\begin{equation} y(s) = ( G_1(s) + G_2(s) )u(s) \end{equation}
システムのフィードバック接続
次に、ブロックのフィードバック接続について説明します。フィードバック接続は次の図で与えられます。
ここでの図は、負帰還というフィードバック信号にマイナスをつける表現です。プラスの時は正帰還と呼びます。
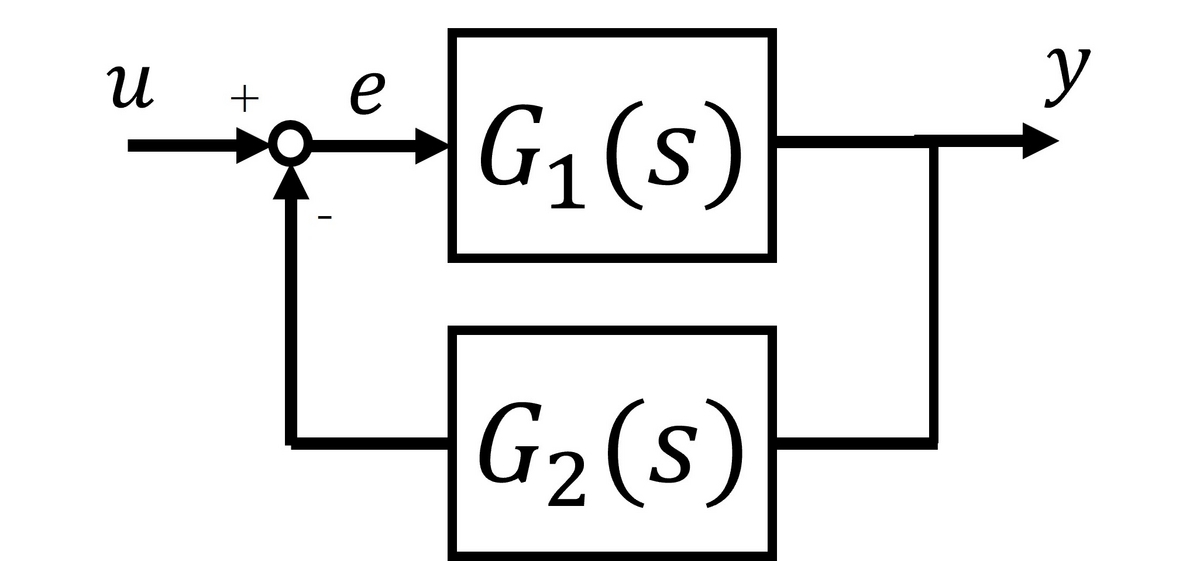
ここで、フィードバック接続において成り立つ式を以下に示します。
\begin{equation} y(s) = G_1(s) e(s) \\ e(s) = u(s) - G_2(s) y(s) \end{equation}
この二つの式を連立してを消去します。このとき
\begin{equation} y(s) = G_1(s) (u(s) - G_2(s) y(s) ) \end{equation}
が得られ、さらにから
までの入出力伝達関数として表記すると
\begin{equation} y(s) = \frac{G_1(s)}{1+G_1(s)G_2(s)} u(s) \end{equation}
を得ることができます。
複雑なブロック線図表現がされていても、各ブロック前後の入出力関係を表現し、その上で関係を調べたい変数以外の項を消去していくことで問題なく入出力特性を調べることが可能です。
入出力システムの安定性と内部安定性
システムの入出力関係を伝達関数表現した場合、そのシステムが安定であったとしても系が不安定な場合があります。例えば、
\begin{equation} G_1(s) = \frac{s-1}{s+1} \\G_2(s) = \frac{s+2}{s-1} \end{equation}
のとき、これらを直列接続した伝達関数は安定になりますが、実は不安定なシステムとなります。不安定極に起因する応答の発散が直列接続されたシステムの出力では観測できないだけです。なお、このような不安定極と零点の相殺を「不安定な極零相殺」と呼びます。
直列接続の場合と同様に、
\begin{equation} G_1(s) = \frac{2}{s-1}+\frac{2}{s+1} \\G_2(s) = -\frac{2}{s-1} \end{equation}
と与えられた場合は、並列接続システムは安定ですが、実は不安定なシステムとなります。このように、システムの安定性を確認する上で入出力関係だけ確認することは不十分であり、内部安定性を満たす必要があります。
ブロック線図の動画・関連記事
以下はブロック線図について説明している動画になります。
関連記事はこちらです。
こんとろラボ:
ブロック線図の基礎と制御用語。読み方・書き方・使い方を解説! (controlabo.com)
ブロック線図の例はこちらの記事:
よくあるブロック線図の例6選と、読み方のコツ (controlabo.com)
自己紹介
岡島 寛 (熊本大学工学部情報電気工学科准教授)
制御工学の研究をしています。モデル誤差抑制補償器,状態推定,量子化制御など
研究室HP
岡島寛 (システム制御 control-theory.com)
English Web Page
Hiroshi Okajima (Control Engineering control-theory.com)
制御動画ポータルサイト
制御工学チャンネル(伝達関数・状態方程式・MATLABなど)
電気動画ポータルサイト
本記事をお読みいただきありがとうございます。役に立った、と思われましたら、ブックマーク・シェア等のアクションをしていただければ嬉しいです。
以上がブロック線図に関する関連記事になります。本記事は以上です。