この記事ではラウス・フルビッツの安定判別法についてまとめます。制御システムの安定性について説明した動画や関連記事リンクは最下部に置いています。
伝達関数の安定性
入出力伝達関数が与えられたとき、その安定性を判別するには、
の分母多項式の係数に着目する必要があります。
\begin{equation} G(s) = \frac{N(s)}{D(s)} \end{equation}
分母多項式の係数を確認して安定性を調べます。まず、の係数を確認したとき、全ての係数が同じ符号である必要があります。例えば、
が
\begin{equation} D(s) = s^3 -3s^2+4s+2 \end{equation}
と与えられると符号が異なる係数があることから一目で不安定システムであることがわかります。
ラウスの安定判別法
ラウス表を構成し、その係数を確認することで安定性を調べることができます。
まず、は次のように与えられるものとします。
\begin{equation}s^n + a_{n-1}s^{n-1}+a_{n-2}s^{n-2}\cdots a_1 s + a_0\end{equation}
このとき、次のようにラウス表を構成します。
まず、および
の最初の2行については
の係数が高次から順に交互に並べていきます。
その後、の行に対応する
を計算し、
に対応する
を順に計算していきます。まず、
は
\begin{equation} b_1 = \frac{a_{n-1}a_{n-2} - a_{n-3} }{a_{n-1}}\end{equation}
と計算され、は
\begin{equation} b_2 = \frac{a_{n-1}a_{n-4} - a_{n-5} }{a_{n-1}}\end{equation}
と計算され、は
\begin{equation} b_3 = \frac{a_{n-1}a_{n-6} - a_{n-7} }{a_{n-1}}\end{equation}
と計算されます。上2行の係数に対するたすき掛けの要領での計算を順に進め、全ての演算を終えると次の行の計算をしていきます。そのように全ての演算を終えたとき、表の赤で示される列(最左列)の数列をラウス数列と呼びます。
このラウス数列の符号が反転しなければ安定であり、反転すると不安定です。そして、反転の回数が不安定極の個数に相当します。
フルビッツの安定判別法
フルビッツの安定判別法はラウスの安定判別法と等価なものとして知られており、タイトルのように両者を併せて「ラウス・フルビッツの安定判別法」と呼びます。
の係数を行列の係数として与えた行列群を考えて、これらの行列式の値で安定性をチェックする方法です。
低次システムの安定性について
伝達関数がと与えられる一次系の場合は、
が安定であるための必要十分条件となります。ここでは、さらに2次系と3次系の条件を示します。
2次系の場合は(プロパーな)伝達関数は次のように与えられます。
\begin{equation}G(s) = \frac{b_2s^2+b_1s + b_0}{s^2+a_1s + a_0}\end{equation}
このとき、の場合にシステムが安定となります。これは、
によって安定性が示されることを前述しているように、
の係数列には依存せずに安定性が決まります。
さらに、3次システムではに対して、
および
が安定であるための必要十分条件となります。
例題
まず、が次式で与えられた場合について考えます。
\begin{equation} D(s) = s^4 +5s^3 + 7s^2+4s+2 \end{equation}
このとき、最初の2行は次のように与えられます
ここから、を計算し、さらに
を計算します。
ラウス数列の係数が全て正であり、安定であることが確認できます。このを分母多項式とした以下のシステム
のインパルス応答を確認します。
\begin{equation}G(s) = \frac{s+5}{s^4+5s^3+7s^2+4s+2}\end{equation}
応答は以下のようになり、値が零に収束していることが確認できます。
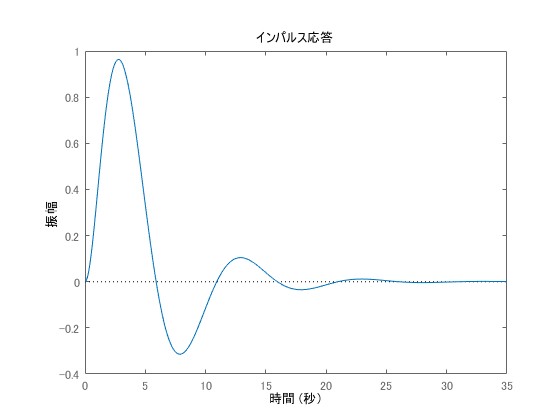
このケースで極はであり、手計算での因数分解は非常に困難です。そのような対象でもラウスの安定判別法でシステムの安定性を確認できます。
なお、の値を
ではなく
とするとラウス表の値が変わりラウス数列の符号が反転します。そのような場合でインパルス応答を表示したものが以下であり、値が発散することがわかります。

ラウスの安定判別法の応用例
ラウスの安定判別法では、極の実部が負か否かをチェックしますが、極の実部がある値よりも小さいか否かをチェックしたい場合もラウスの安定判別法が利用できます。
具体的には、与えられたに
を代入し
を考えます。
の値よりも小さな場所に極があるか否かをチェックするためには、
の多項式に対してラウス表を作成し、ラウス数列が反転するか否かをチェックするだけでよいです。例えば
\begin{equation} D(s) = s^2 + 3s + 2\end{equation}
は、安定であることが係数から容易に判断できますが、として
を代入すると
\begin{equation} D(\hat s - 2) = (\hat s - 2)^2 + 3(\hat s - 2) + 2\end{equation}
であり
\begin{equation} D(\hat s - 2) = \hat s^2 - \hat s \end{equation}
となることから、ラウス数列が反転することは明らかです。ここで、の極は
であり、実際に
よりも左側に全ての極が無いことがわかります。
安定性の動画・関連記事
以下はシステムの安定性について説明している動画になります。
自己紹介
岡島 寛 (熊本大学工学部情報電気工学科准教授)
制御工学の研究をしています。モデル誤差抑制補償器,状態推定,量子化制御など
研究室HP
岡島寛 (システム制御 control-theory.com)
English Web Page
Hiroshi Okajima (Control Engineering control-theory.com)
制御動画ポータルサイト
制御工学チャンネル(伝達関数・状態方程式・MATLABなど)
電気動画ポータルサイト
本記事をお読みいただきありがとうございます。役に立った、と思われましたら、ブックマーク・シェア等のアクションをしていただければ嬉しいです。
以上がラウスフルビッツの安定判別に関する関連記事になります。本記事は以上です。