ここでは、モデル誤差抑制補償器(Model Error Compensator, MEC)の効果を確認するための数値例として2次システムのシミュレーション結果を示します。
モデル誤差抑制補償器 についての説明は以下の記事をご覧下さい。
blog.control-theory.com
制御対象と問題設定
ここでは、制御対象として次の対象を扱います。
ここで、本記事では
誤差がない場合
まず、誤差がない場合についてフィードバック比例フィードバック制御 器
フィードバック制御 系のブロック線図
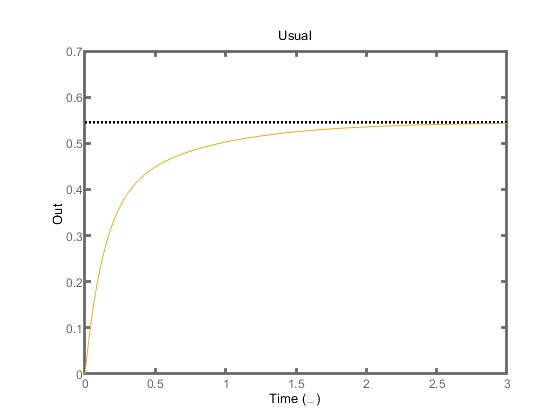
次に制御結果(ステップ応答)が以下のようになります。
MECなし(フィードバック制御 )
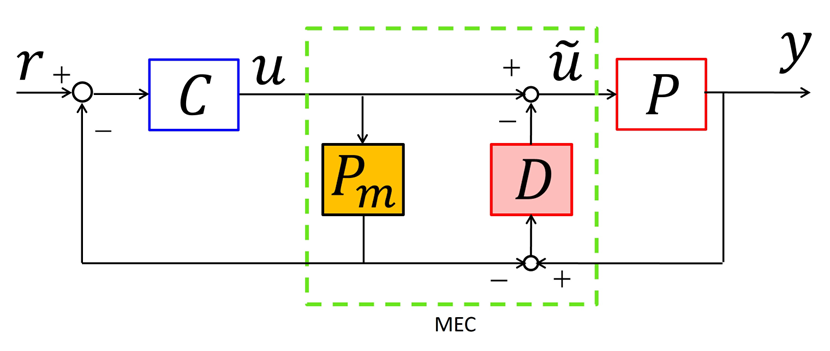
次に、誤差補償器を次のように定めてMECを構築した場合の結果を示します。
誤差補償器はPI制御構造にしています。ハイゲインフィードバックとなっています。MECを含む制御構造は次のように与えられます。
MEC+フィードバック制御 系
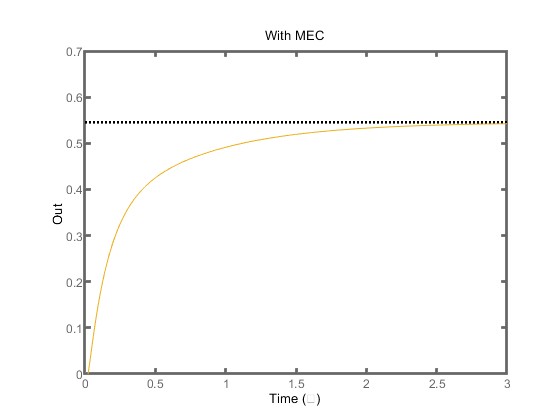
このとき、得られた応答波形は次のようになります。
MEC+フィードバック制御
ほとんど変わらない応答波形になっていることがわかります。
誤差がある場合
誤差がある場合の応答波形をそれぞれ示します。
MECなしの場合(バラツキを含む10種類の制御対象)
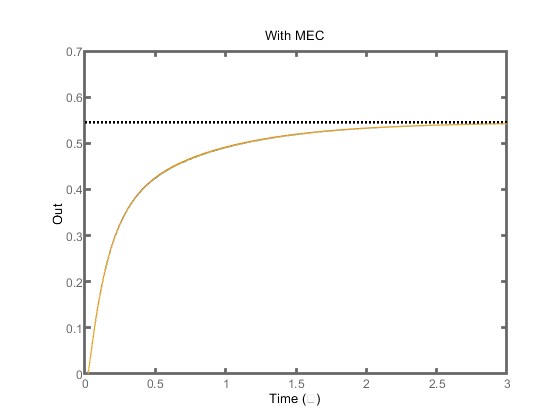
次にMECありの場合の応答波形です。
MEC+フィードバック制御 (バラツキを含む10種類の制御対象)
MECを含む制御系を構成することにより、
最後に、MATLAB コードを示します。
clear;
close all;
a = 1;
b = 2;
c = 1.5;
for i = 1:10
delb = -0.1+0.2*rand();
dela = -0.1+0.2*rand();
delc = -0.1+0.2*rand();
P=(c+delc)*tf([1 b+delb],[1 -(a+dela)])*tf([1],[1 5]);
Pn = c*tf([1 b],[1 -a])*tf([1],[1 5]);
Con=5;
%C=tf([2.5 0.005],[1 0]);
D=tf([50 50],[1 0]);
% MECなし
feedback(P*Con,1);
figure(1)
step(ans)
xlabel('Time')
ylabel('Out')
title('Usual')
xlim([0 5])
ylim([0 2])
hold on
% MECあり
feedback(Pn*Con,1)*feedback(P*D,1)-feedback(Con,Pn)*feedback(P,D);
figure(2)
step(ans)
xlabel('Time')
ylabel('Out')
title('With MEC')
xlim([0 5])
ylim([0 2])
hold on
end
2次制御対象についてMECの効果を確認しました。本記事は以上です。
関連記事
blog.control-theory.com